EOM2-9シリーズ統合タイプクォーターターン電気アクチュエーター

製品ビデオ
アドバンテージ

保証:2年
ユーザーインタラクションインターフェイス:Intelligent Typeには、特殊なリモートコントロールを備えた真新しいUIコントロールインターフェイスが装備されており、アクチュエータ構成操作のさまざまな機能を実現します。
エネルギー効率:単相およびDC電源は、太陽光および風力発電用途に適したオプションの超低エネルギー消費です。
特許整備士のデザイン:EOMシリーズの電気アクチュエーターには、手動/電気自動スイッチング機能が装備されています。したがって、クラッチの設計はありません。したがって、マシンの実行中にハンドホイールを回転させることができます。これは、オペレーターの安全性を確保するためです。このようなデザインは、未来の主流のトレンドになります。
360°位置インジケーター:高強度、アンチサンライト、ROHSに準拠したプラスチック3Dウィンドウインジケーターを採用しています。ユーザーは、死んだ角度がないため、360°の視角内でアクチュエータのストローク位置を観察できます。
交換可能な接続フランジ:ベース接続ホールは、さまざまな接続フランジサイズを備えたISO5211標準に準拠しています。バルブフランジ接続の目的の異なる穴の位置と角度で達成するために、同じタイプのアクチュエーターに交換および回転できます。
惑星ギア:惑星ギアセットに高強度合金鋼を使用します。よりコンパクトで効率的で、同じボリュームに対してより大きな出力を達成します。同時に、モータードライブとハンドホイールの動作のための微分入力があるため、電気的かつ手動で同時に動作することができます。
スプロケット操作:クラッチメカニズムのない手動および電気的にOperationGの機能に基づいて、スプロケットの動作は、バルブをより高い位置で操作する方が便利です。
標準仕様
| アクチュエータボディの材料 | アルミニウム合金 |
| 制御モード | オンオフタイプと変調タイプ |
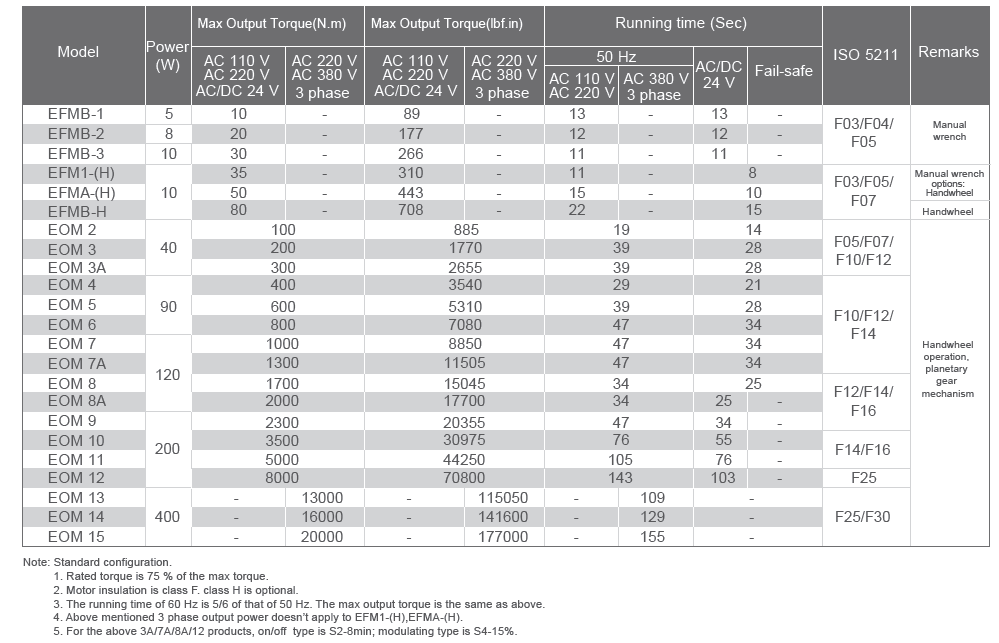
| トルク範囲 | 35-20000N.M |
| 実行時間 | 11-155S |
| 適用される電圧 | 1フェーズ:AC / DC24V / AC110V / AC220V / AC230V / AC240V 3フェーズ:AC208-480V |
| 周囲温度 | -25°C…..70°C; |
| 防止レベル | JB/T8219 |
| ノイズレベル | 1m以内の75 dB未満 |
| 侵入保護 | IP65 |
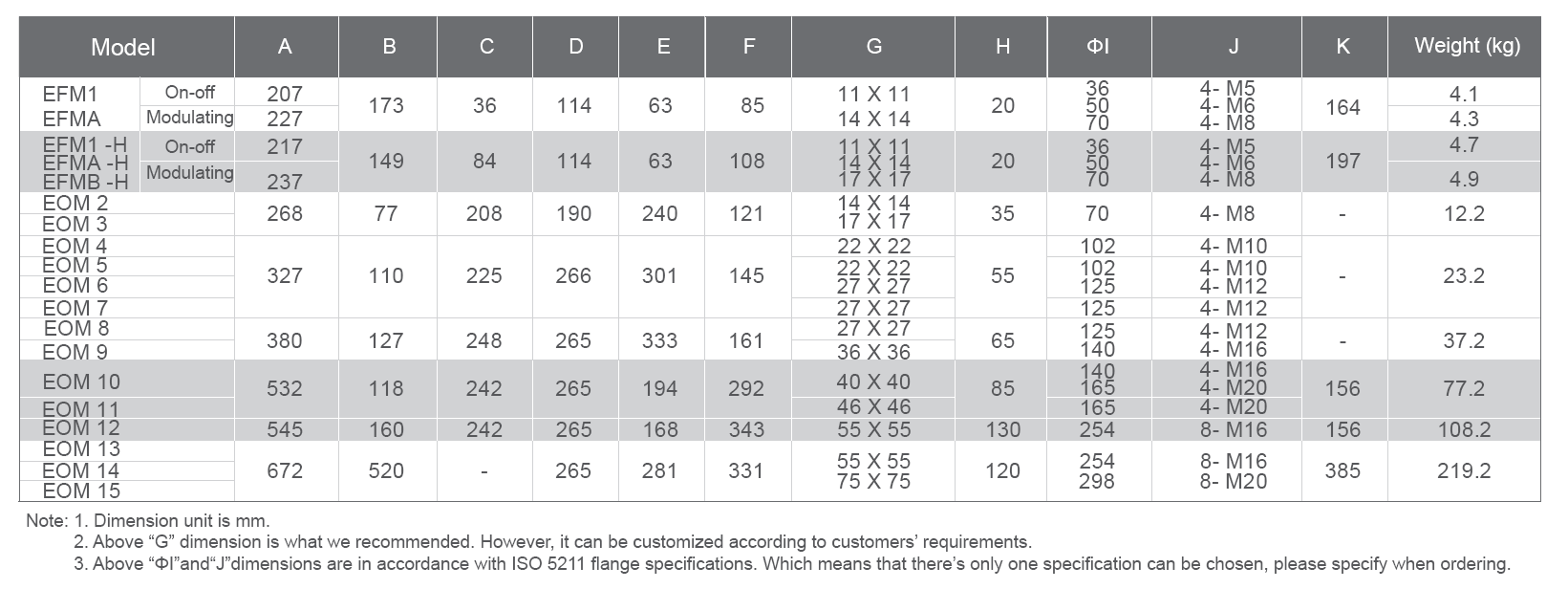
| 接続サイズ | ISO5211 |
| モーター仕様 | クラスF、 +135°C +275°Fまでの熱プロテクター。オプション:クラスh |
| 作業システム | オンオフタイプ:S2-15分、1時間あたり600回以下開始スタートタイプを変調します。オプション:1時間あたり1200回 |
| オン/オフタイプ信号 | 入力信号:AC/DC 24補助電源入力コントロールまたはAC 110/220V入力コントロール 光電子分離 信号フィードバック: 1.バルブの接点を閉じます 2.バルブの接点を開きます 3。標準:トルク信号の開く接触 4.閉鎖トルク信号連絡先ローカル/リモート連絡先 5。オプション:統合障害コンタクト4〜20 mAが送信されます。 誤動作フィードバック:統合障害アラーム;電源オフ;モーターの過熱、位相のラッケ、トルク上。信号オフ; ESDは保護を超えて、端子出力を超えています |
| タイプ信号を変調します | 入力信号:4-20MA; 0-10V; 2-10V 入力インピーダンス:250Ω(4-20ma) Ouput Singal:4-20ma; 0-10V; 2-10V 出力インピーダンス:≤750Ω(4-20ma);完全なバルブストロークの±1%内の再現性と直線性 信号逆:サポート 損失信号モード設定:サポート デッドゾーン:フルストローク内の0.5〜9.9%の調整可能レート |
| 表示 | 3Dオープニングインジケーター オン /オフ /リモートコントロール /障害インジケーター オープン /クローズ /パワーインジケーター |
| その他の関数 | 1。位相補正(4相電源のみ) 2。トルク保護 3。運動過熱保護 4。湿気 - 耐性ヒーター(反モイストデバイス) |
パフォーマンスパルメーター
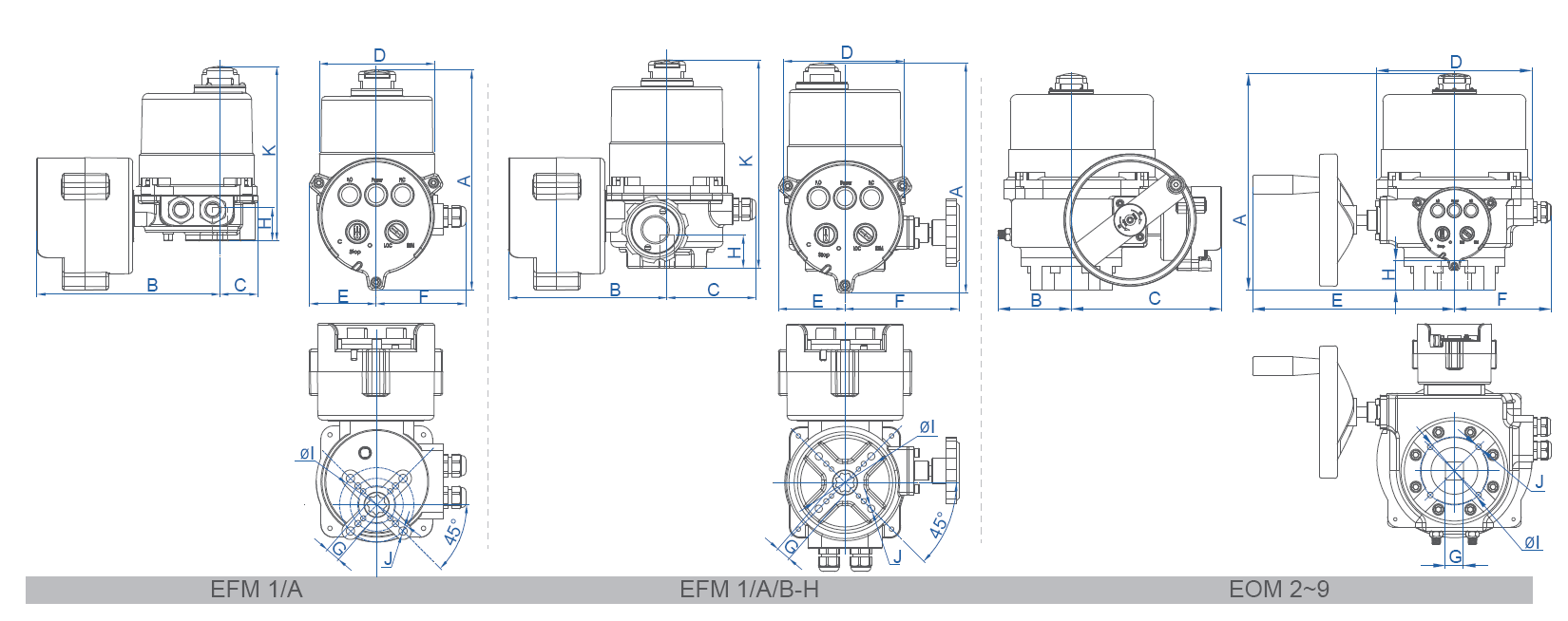
寸法
パッケージサイズ

私たちの工場

証明書
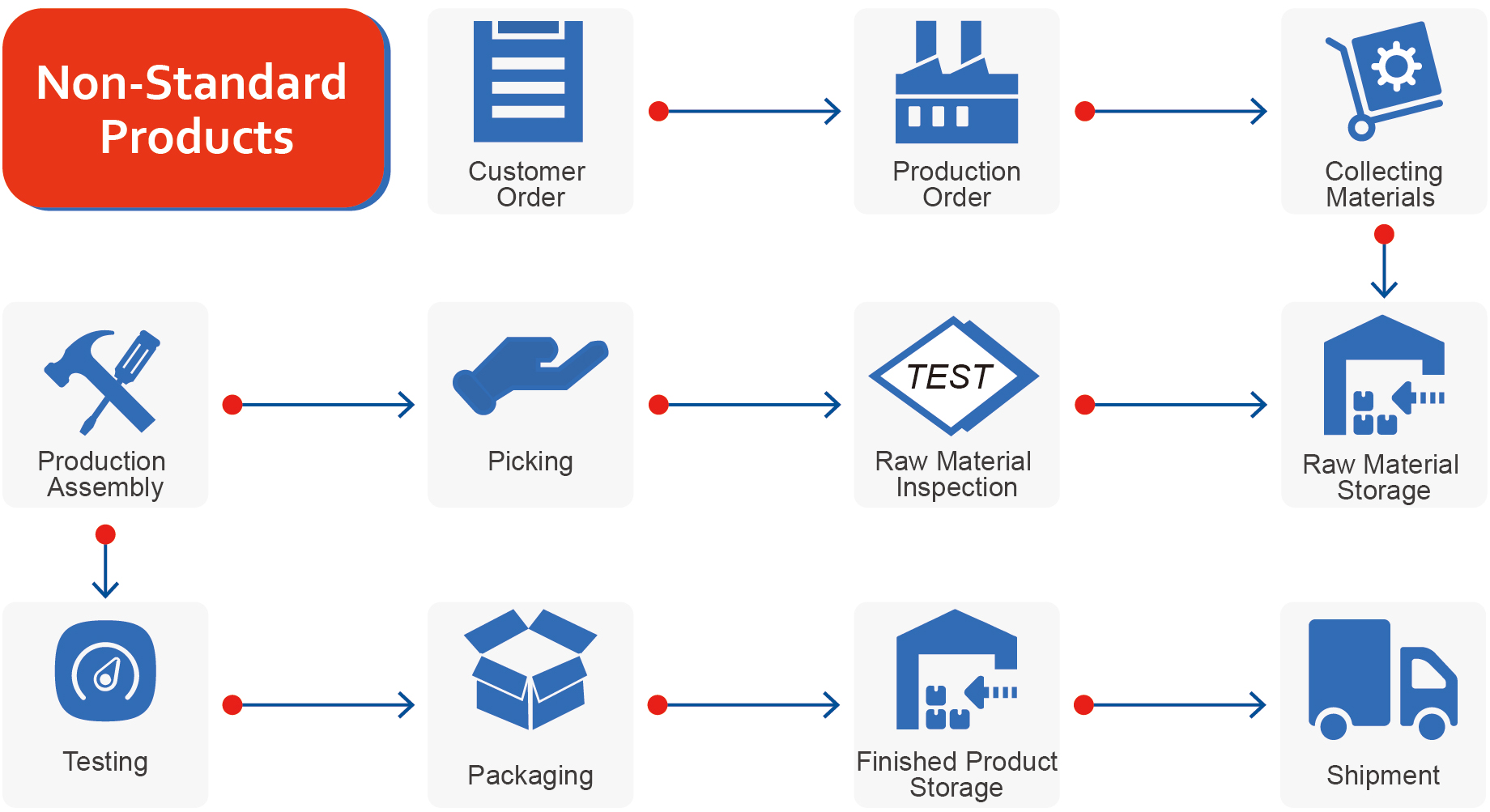
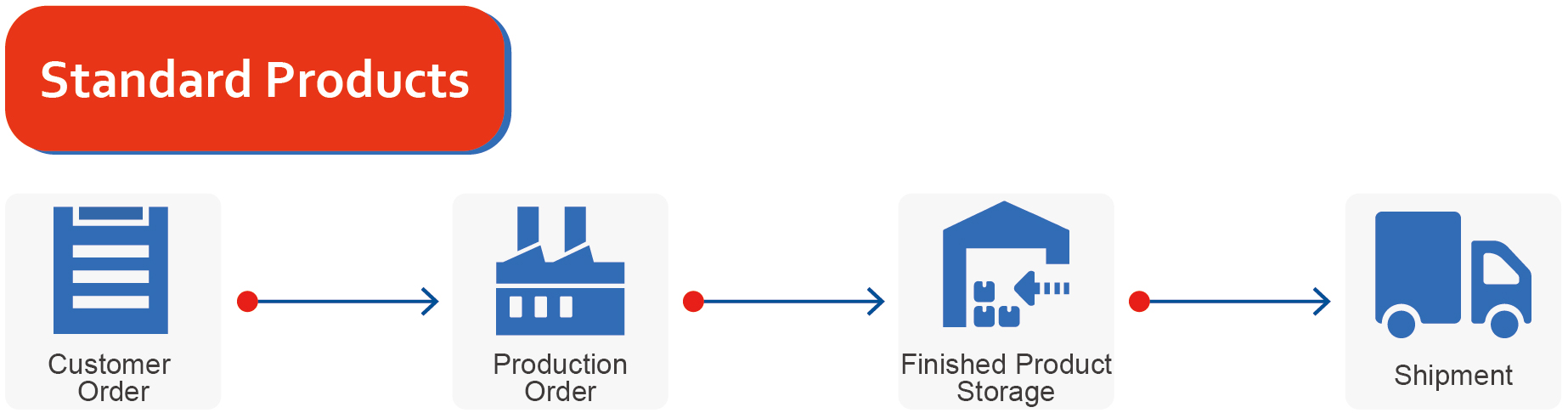
生産プロセス
出荷

