EOM2-9シリーズ一体型四分の一回転電動アクチュエータ

製品ビデオ
アドバンテージ

保証:2年
ユーザーインタラクションインターフェース:インテリジェントタイプは、最新のUI制御インターフェースを搭載し、専用のリモコンを使用することで、アクチュエータの構成操作における様々な機能を実現します。
エネルギー効率:単相および直流電源はオプションで、超低消費電力で、太陽光発電や風力発電の用途に適しています。
特許取得済み機械設計:EOMシリーズの電動アクチュエータは、手動/電動自動切り替え機能を備えています。クラッチレス設計のため、機械の稼働中でもハンドルを回転させることができ、オペレーターの安全性を確保します。このような設計は、今後の主流となるでしょう。
360°位置表示器:高強度、耐日光性、RoHS指令準拠のプラスチック製3Dウィンドウインジケータを採用。死角がないため、360°の視野角でアクチュエータのストローク位置を確認できます。
交換可能な接続フランジ:ベース接続穴はISO5211規格に準拠しており、接続フランジのサイズも様々です。同じタイプのアクチュエータであれば、交換や回転が可能で、バルブフランジの接続穴の位置や角度を様々に変更できます。
遊星歯車機構:遊星歯車機構には高強度合金鋼を使用することで、よりコンパクトかつ高効率を実現し、同じ体積でより大きな出力を得ることができます。同時に、モーター駆動とハンドル操作に差動入力を採用することで、電動と手動の両方で同時に操作することが可能です。
スプロケットの動作:クラッチ機構なしで手動および電動で操作できるという特徴に基づき、スプロケット操作はバルブをより高い位置で操作するのに便利です。
標準仕様
| アクチュエータ本体の材質 | アルミニウム合金 |
| コントロールモード | オンオフタイプと変調タイプ |
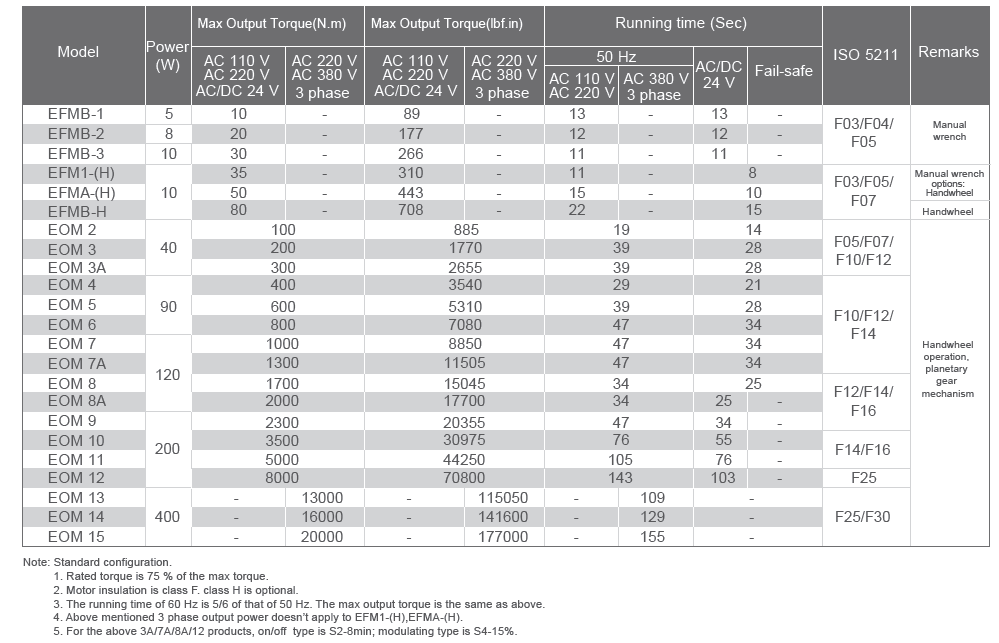
| トルク範囲 | 35-20000N.m |
| 上映時間 | 11-155秒 |
| 適用電圧 | 1相:AC/DC24V / AC110V / AC220V / AC230V / AC240V 3相:AC208-480V |
| 周囲温度 | -25℃~70℃ |
| 防振レベル | JB/T8219 |
| 騒音レベル | 1m以内で75dB未満 |
| 侵入保護 | IP65 |
| 接続サイズ | ISO5211 |
| モーター仕様 | クラスF、+135℃(+275°F)までのサーマルプロテクター付き。オプション:クラスH |
| 作業システム | オンオフタイプ:S2-15分、1時間あたり最大600回起動。変調タイプ:S4-50%、1時間あたり最大600回起動。オプション:1時間あたり1200回。 |
| オン/オフタイプの信号 | 入力信号:AC/DC 24V補助電源入力制御またはAC 110/220V入力制御 光電子絶縁 信号フィードバック: 1. バルブ接点を閉じる 2. バルブ接点を開く 3. 標準:開度トルク信号接点 4. 閉トルク信号接点 ローカル/リモート接点 5. オプション:4~20mAの電流を送信する統合故障接点。 故障フィードバック:統合故障アラーム、電源オフ、モータ過熱、位相欠落、過トルク、信号オフ、ESD保護範囲外、端子出力 |
| 変調型信号 | 入力信号:4-20mA、0-10V、2-10V 入力インピーダンス:250Ω(4-20mA) 出力信号:4-20mA、0-10V、2-10V 出力インピーダンス:≤750Ω(4-20mA);再現性と直線性:バルブ全開ストロークの±1%以内 信号反転:サポート 信号損失モード設定:サポート デッドゾーン:フルストローク内で0.5~9.9%の調整可能なレート |
| 表示 | 3D開口インジケーター オン/オフ/リモコン/故障表示 開閉/電源表示 |
| その他の機能 | 1. 位相補正(4相電源のみ) 2. トルク保護 3. モーター過熱保護 4. 防湿ヒーター(防湿装置) |
パフォーマンスパラメータ
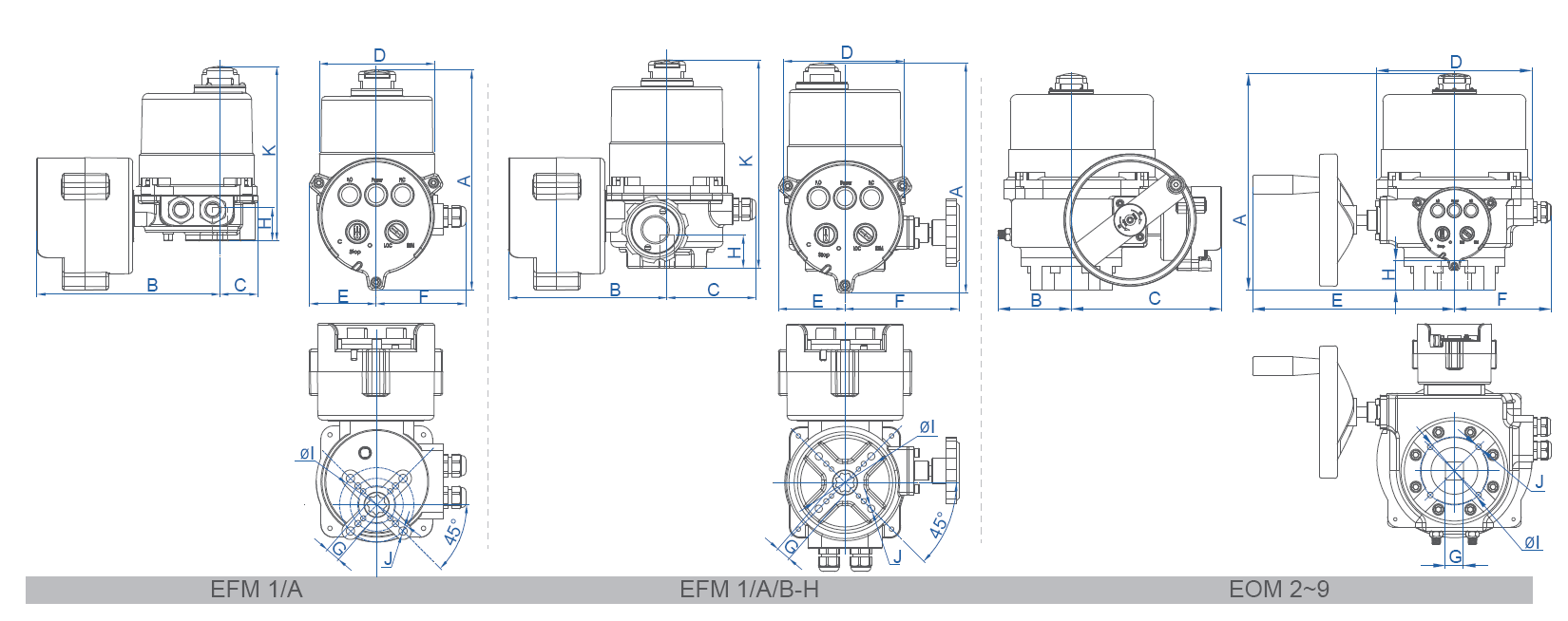
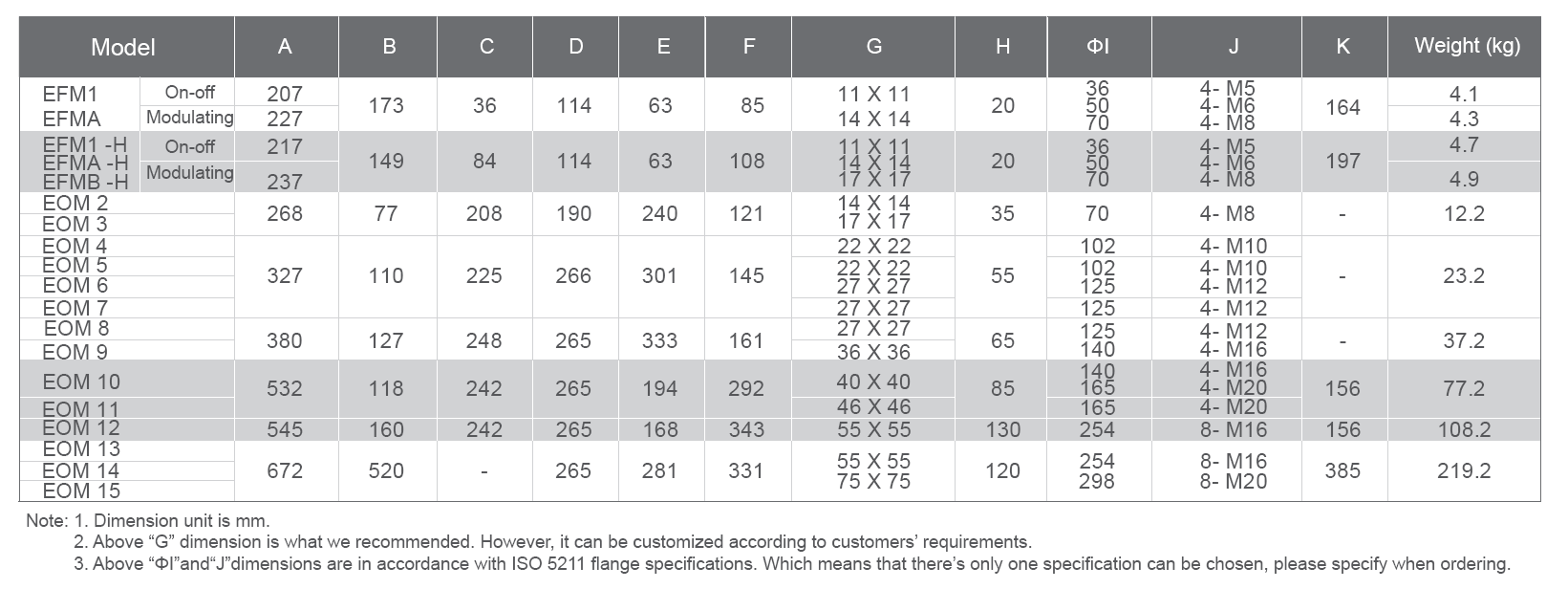
寸法
パッケージサイズ

当社の工場

証明書
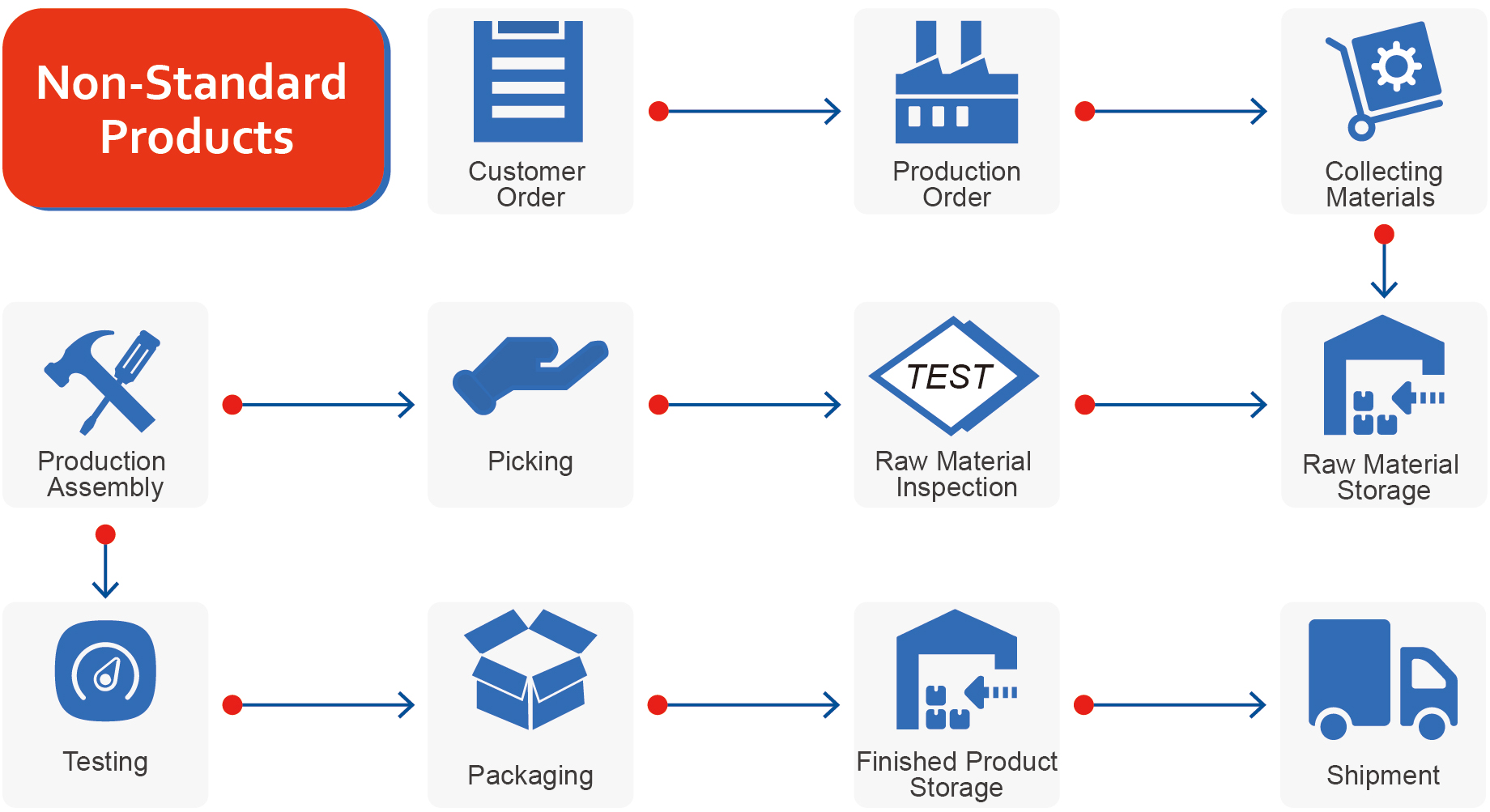
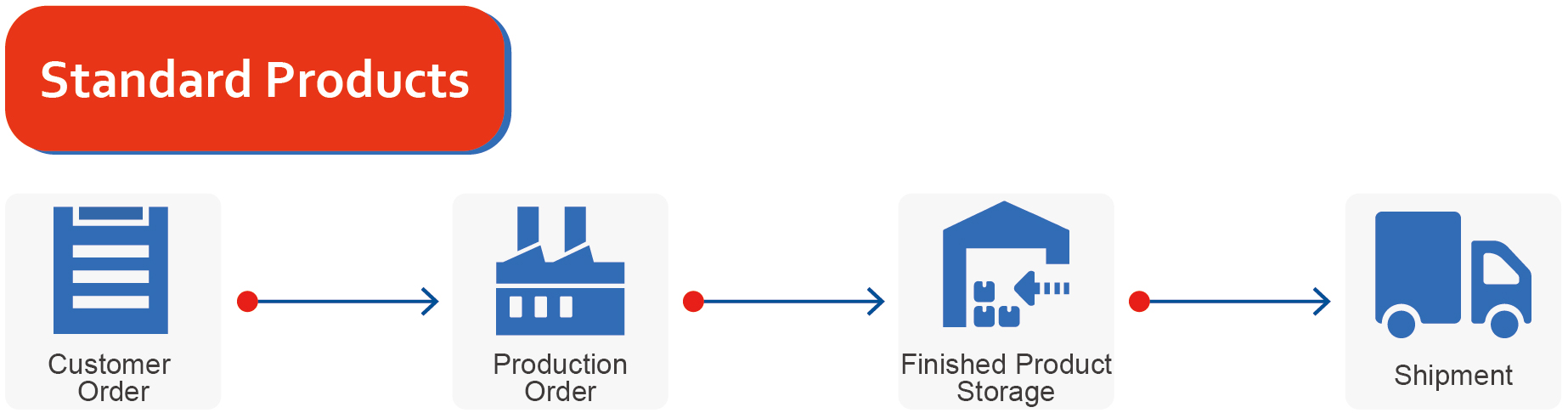
製造工程
出荷

